User:Paulne: Difference between revisions
No edit summary |
No edit summary |
||
| Line 12: | Line 12: | ||
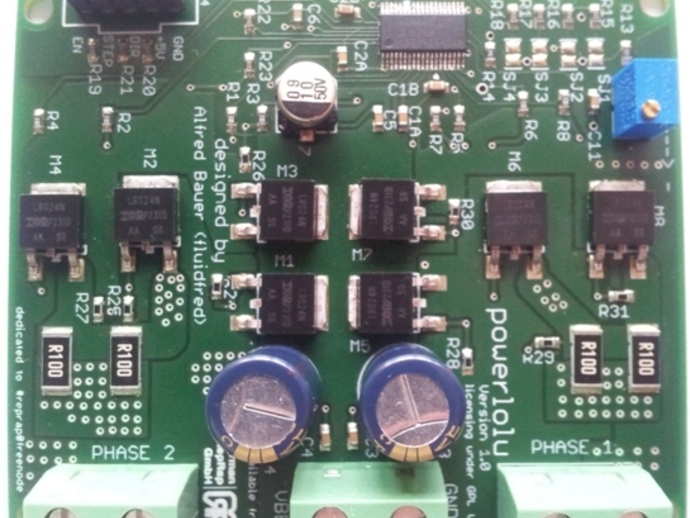
This board does not directly attach to the Ramps board, but uses 4 wires to attach to one of the sockets that the Pololu board plugs into on the ramps board. | This board does not directly attach to the Ramps board, but uses 4 wires to attach to one of the sockets that the Pololu board plugs into on the ramps board. | ||
Note #1 - This is not very mechanically or electrically stable. | Note #1 - This is not very mechanically or electrically stable. | ||
Note #2 - The Powerlolu board is | Note #2 - The Powerlolu board is current limited but not fused. The power supply to the board should have an inline fuse no greater than 10A. To set the driver current limit see[http://http://www.germanreprap.com.au/en/support/documentation/Powerlolu]. | ||
Use a seperate Arduino Mega for the height control system. Requires a seperate Ramps & Powerlolu board for the z-axis stepper. Requires a custom software sketch in the Arduino to connect Ramps to the capacitive height sensor. Requires some pushbuttons for jog up/down and engage/disengage height feedback. With some custom g or m codes and a serial line between the two Arduinos the attached pc could jog the z-axis and engage/disengage feedback instead. | Use a seperate Arduino Mega for the height control system. Requires a seperate Ramps & Powerlolu board for the z-axis stepper. Requires a custom software sketch in the Arduino to connect Ramps to the capacitive height sensor. Requires some pushbuttons for jog up/down and engage/disengage height feedback. With some custom g or m codes and a serial line between the two Arduinos the attached pc could jog the z-axis and engage/disengage feedback instead. | ||
Revision as of 22:41, 13 July 2013
Plasma/Acetylene Cutter
Ramps 1.4 Heater circuit to be used for oxygen solenoid. Connector is a 6 terminal, screw terminal block. Use bared wire for connection. Solenoid voltage must be same as stepper voltage supplied to ramps board. Typically 12 or 24 volts DC. Media:180px-RAMPS1-3 6pos.JPG
{kind=link}
Stepper motors are 425 oz.in 4 volt 2.8 amp. This exceeds the 1-1.5A capability of the ramps Pololu drivers. Decision has been made to use the Powerlolu board at [1] Schematic seems ok(Eagle format). Board file seems unfinished. Powerlolu drive capability is 10A. Media:Powerlolu_web_preview_featured.jpg This board does not directly attach to the Ramps board, but uses 4 wires to attach to one of the sockets that the Pololu board plugs into on the ramps board. Note #1 - This is not very mechanically or electrically stable. Note #2 - The Powerlolu board is current limited but not fused. The power supply to the board should have an inline fuse no greater than 10A. To set the driver current limit see[2].
{kind=link}
Use a seperate Arduino Mega for the height control system. Requires a seperate Ramps & Powerlolu board for the z-axis stepper. Requires a custom software sketch in the Arduino to connect Ramps to the capacitive height sensor. Requires some pushbuttons for jog up/down and engage/disengage height feedback. With some custom g or m codes and a serial line between the two Arduinos the attached pc could jog the z-axis and engage/disengage feedback instead.