Talk:Oliver Log
Tue, Oct,31,2017
Some links to D3D Freecad WB:
- http://opensourceecology.org/wiki/D3D_Workbench_in_FreeCAD
- https://github.com/skaiser/D3D-Printer-Workbench
- https://github.com/skaiser/FreeCAD_Workbench_Starter
- https://www.youtube.com/watch?v=A6DL3FL5YZo (Stephens instructions video)
Some links to OSEdev Freecad WB:
- http://opensourceecology.org/wiki/OSEDev_Workbench
Wed, Oct,25,2017
some links towards
- Web-GL tutorial: http://learningwebgl.com/blog/
- Web-GL wiki: https://www.khronos.org/webgl/wiki/Main_Page
- web-GL from Blender nice demo: https://www.blend4web.com/en/demo/dairy_plant/
- web-Gl debugger: http://webglplayground.net/
- freecad to web-gl export modul: https://gist.github.com/yorikvanhavre/2286282
- git workflow (off topic, but good): https://www.khronos.org/webgl/wiki/Using_Github_To_Contribute
- Additive Manufacturing file format (AMF): https://en.wikipedia.org/wiki/Additive_Manufacturing_File_Format
Thu, Aug,17,2017
Off-Topic: 3D-printed materials for insulation: [1]
Tue, Aug,01,2017
- Some checkpoints when trying to make the new pcb running:
- Start with a testrig (a single D3D-axis), dont mount it immediately to the torchtable without prior testing
- Check Step-Width, e.g. if the pulley has a different tooth-number and diameter stepwidth can be different, too
- Check serial data-output for reasonable values before switching on the steppers (by the powersupply; the nano meanwhile can run "dry" by getting power from the USB-datacable). Do this with holding a metal plate in 0mm up to 30mm distance.
- Dont start the steppers, without having the sensorhead installed and holding a metal-plate in front of it. Other wise it would produce zero-values and when trying to balance the algorithm would add more and more steps for compensation and the stepper would go through the wall.
- make sure you have have connected the metal plate and as well the testrig-structure to the SHIELD-ground
- Startposition is with 0mm distance. From this it will take a sample and then goes to 30mm and take another sample for calibration. Then it will go in a loop and trying to balance the distance around 15mm. I am going to upload a new firmware-version where endstop and jogwheel button will be integrated. Then the 0mm-position will be found automatically by homing. The 15mm will act as a default-value, but if you then push the button you switch from autobalancing- into manual-mode and change this 15mm-default-value by turning the jogwheel. Pushing again switches back into autobalancing mode.
- make sure the power-connector is on 5V and not on 12V (!!!)
Tue, Jul,11,2017
- Lesson learned (the hard way): The Arduino Nano analog ports A6 and A7 can NOT be used as digital-input-ports, like A0 to A5. see [2] and there [3] as a workaround.
Wed, Jul,05,2017
Some links to earlier work on the TorchHeightCTRL and its firmware
[4] Aidans Log of 2014
[5] Aidans Talk with Paul
[6] Aidans Talk with Klemen
[7] Measurements from Klemen Zhivkovic, Sep. 2015, youtube
[8] [9] other useful stuff, Ad7746-related
Wed, Jun,14,2017
Some links to a (plasma-)torchtable build-report: [10] [11]
---
offtopic stuff: [12]
Tue, Jun,06,2017
Preparation for torchtable-workgroup meeting on 06.05.:
TorchHeightCTRL V.02 todo:
* create GitHub repository
* complete BOM and order Parts and pcbs
* send kit to Abraham
* solder pcb
* make User-Panel
* complete 3d-printed universal axis as test-rig
* make Jog-Wheel (potentiometer or better: rotary encoder [13]) - see e.g. [14] (24 pulses per revolution ==> better fine handling !!!) combined with this wheel [15] - or this [16] (100 pulses per revoultion ==> more coarse handling !!!)
* program sprinter-derivated firmware
* make bigger and mill-able pcb-layout
Mon, Jun,05,2017
Lesson learned: When doing a pcb-layout then do *first* the mount-holes and *afterwards* the entire routing !!!
Fri, Jun,02,2017
THCctrl, TB6600: In some wiring diagrams you find a common +5V line on EN,DIR,PUL (=STEP) in others they have a common ground. It seems that both is possible, see: [17], [18] and the links in Chas' log.
In RAMPS-like configurations it is often seen as common-ground connection [19] and sometimes with EN left unconnected. I assume its ok to connect EN, because otherwise the state of the stepper cannot be controlled externally. EN means that the stepper is active and draws current even if it doesnt move (and therefore getting warm). But there can be situations where its safe to inactivate that, e.g. wehn a 3Dprinter disables the steppers as soon as the print is finished. So this should be manageable by the controler.
---
Detailed description about "Using the Fork-and-Branch Workflow" within GitHub, if you are working as team on kollaborative projects. See also https://help.github.com/articles/fork-a-repo/
Mon, May,29,2017
Idea to make a D3D-workshop completely relaxed: Just preproduce a number of printers and calibrate them perfectly. If someone doesnt get its own one ready during the course he can take a readymate one. So the promise "you get out here with a running printer" can be easily fullfilled and the workshop is completely free from any stress and totally relaxed (= best learning conditions)
An interesting extension to this idea could be to let any class produce the printers for the next class (and take home a printer from the last class). So any printer creator becomes a kind of responsible godfather to someone elses printer (social relation ;)) Dont know whether the attendees really want that (but one could ask them; the surplus bonus is a nicely calibrated and perfectly running printer).
Sat, May,27,2017
Preparation for torchtable-workgroup meeting on 29.05.:
THCctrl todo:
* replace J2 with a bnc-terminal
* add arduino nano
* add interface for TB6600 stepper driver controler
* add interface for Display-Keypad
Fri, May,26,2017
Lesson learned: I tried in Kicad unsuccessfull different ways to import the 3d .wrl-files automatically, eg. by environment path-variable $KISYS3DMOD, but it is however possible to assign manually a 3d-form towards a footprint by editing its parameters (right mouseclick over footprint, then choose the footprint and in its 3d-settings the "add form" button) and let it point towards your local library-path .wrl-file. There you can also correct wrong orientations of the object, e.g. in a diode.
Tue, May,23,2017
Some links related to the torchtable height controler:
Working document [20] AD7747 [21] Dummy page (?) [22] Pauls log [23]
---
Trying to re-use Pauls KiCad-Files run into the problem of beeing an older Version, what means all links are broken, see all the question marks in
- Reimport-problem on older Kicad files
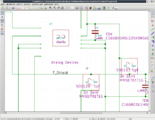
All default parts are in the newer Kicad version replaced by smaller ones, so the links are broken

![[15]](https://hackadaycom.files.wordpress.com/2015/01/dial.jpg?w=800){kind=link}
This is a known problem and theoretically there exists a way to fix it, see https://rheingoldheavy.com/new-stable-kicad-10-steps-to-import-an-old-kicad-project/, but its way to complicated to go through this procedure. Meaning, since Pauls circuit is not too complicated its probably far less work to simply rebuild it from scratch.
---
what about mechanical probing ? https://www.indiegogo.com/projects/bltouch-auto-bed-leveling-sensor-for-3d-printers#/ Answer: probably not well suited because of the heat.
--
Master-thesis on capacitive sensors: [24]
Mon, May,22,2017
Preparation for torchtable-workgroup meeting on 23.05.:
Suggestions for the long axis:
- supportet Rails [25] would be nice for better stiffness and rigidity (see [26] at minute 0:30) . Makes a price difference of about 20,- EUR or less per m .
* Instead of one 1"-shaft we could use two 1/2"-shafts to resemble the recent unversal axis design as is.
* Or instead we can use just one 1"-shaft and place the stepper onto the carriage (like shapeoko) ==> simplyfied end-pieces (they are only needed to fix the belt).
- Universal Controler: Powerlolu as stepperdriver for heavier loads ?
* Was already discussed on OSE in 2013, see [27]
* sources are available at GitHub [28] and Upverter [29] and Allegro [30] and Cuteminds [31] and Balestrino [32].
* new breakout board from OSH park at [33]
* I tested them already [34] [35] in combination with RAMPS and so far they seemed to work well.
![[34]](https://wiki.opensourceecology.de/images/f/f5/Ba_ra_pol_pow.jpg){kind=link}
![[35]](https://wiki.opensourceecology.de/images/b/b6/MF14_stand_BA_vonvorn.jpg){kind=link}