CNC Sawmill: Difference between revisions
Jump to navigation
Jump to search
| (11 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
=Concept= | |||
*Integrate Marlin/RAMPS/Touchscreen since we already use it - with larger stepper motors as chain axis drive for the sawmill - [https://chatgpt.com/share/694dee2a-7a80-8010-ad4b-862460f5c3af] | |||
*{{check}}Sure, but use a more dedicated GRBL/RAMPS with touchscreen. [https://chatgpt.com/share/694dee2a-7a80-8010-ad4b-862460f5c3af]. Can be productized. | |||
*But - second route still requires a custom touchscreen with its own MCU, not the standard screens from Marlin - so the [[Degeneracy]] criterion fails. | |||
*{{check}}{{check}}thus, just modify Marlin, and while not designed for industrial cnc, if we reprogram Marlin, we make it as effective as GRBL/LinuxCNC if we pay attention to programming in added functionality. [https://chatgpt.com/share/694dee2a-7a80-8010-ad4b-862460f5c3af]. The open source revolution is nigh. | |||
**For future proof industrial grade, go to 32 bit controller like Due, which is not more expensive [https://chatgpt.com/share/694dee2a-7a80-8010-ad4b-862460f5c3af] | |||
**And do not try to rewrite a motion kernel - Marlin is already 10+ years of development. [https://chatgpt.com/share/694dee2a-7a80-8010-ad4b-862460f5c3af] | |||
=Working Doc= | =Working Doc= | ||
<html> <iframe src="https://docs.google.com/presentation/d/e/2PACX-1vSzAAA--rujCzU5NU4TiflEvgXWslFzp-jHqYWLxfeN4iLNQ6iKMEAbnjdre1_dCq_eJcwbtjJ-jISc/embed?start=false&loop=false&delayms=3000" frameborder="0" width="480" height="389" allowfullscreen="true" mozallowfullscreen="true" webkitallowfullscreen="true"></iframe> </html> | <html> <iframe src="https://docs.google.com/presentation/d/e/2PACX-1vSzAAA--rujCzU5NU4TiflEvgXWslFzp-jHqYWLxfeN4iLNQ6iKMEAbnjdre1_dCq_eJcwbtjJ-jISc/embed?start=false&loop=false&delayms=3000" frameborder="0" width="480" height="389" allowfullscreen="true" mozallowfullscreen="true" webkitallowfullscreen="true"></iframe> </html> | ||
| Line 10: | Line 18: | ||
[[File:3foottruss.png|100px]][[File:rails.png|100px]][[File:sawmillframeassy2.png|100px]][[File:sawmillframeassy.png|100px]][[File:smalltruss.png|100px]][[File:cncsaw3.png|100px]][[File:cncsaw2.png|100px]][[File:cncsaw.png|100px]] | [[File:12footrebartruss.png|100px]][[File:assemblywithrails2.png|100px]][[File:assemblywithrails.png|100px]][[File:3foottruss2.png|100px]][[File:3foottruss.png|100px]][[File:rails.png|100px]][[File:sawmillframeassy2.png|100px]][[File:sawmillframeassy.png|100px]][[File:smalltruss.png|100px]][[File:cncsaw3.png|100px]][[File:cncsaw2.png|100px]][[File:cncsaw.png|100px]] | ||
<gallery perrow=6> | <gallery perrow=6> | ||
File: | File:12footrebartruss.png|'''12 foot truss, 4-sided.''' - FreeCAD -[[File:12footrebaruss.fcstd]] | ||
File:3foottruss2.png|'''3 foot truss.''' - FreeCAD -[[File:3foottruss.FCStd]] | |||
File: | File:assemblywithrails2.png|'''CNC Saw Assembly.''' - FreeCAD -[[File:cncsawassy.FCStd]] | ||
File:smalltruss.png|'''Small truss.''' - FreeCAD -[[File:smalltruss.FCStd]] | File:smalltruss.png|'''Small truss.''' - FreeCAD -[[File:smalltruss.FCStd]] | ||
File:cncsaw.png|''' | File:cncsaw.png|'''This has the underlying truss sketch.''' - FreeCAD -[[File:cncsaw.FCStd]] | ||
File:cncsaw2.png|'''Sawmill truss.''' - FreeCAD -[[File:cncsawtruss.FCStd]] | File:cncsaw2.png|'''Sawmill truss.''' - FreeCAD -[[File:cncsawtruss.FCStd]] | ||
Latest revision as of 04:06, 26 December 2025
Concept
- Integrate Marlin/RAMPS/Touchscreen since we already use it - with larger stepper motors as chain axis drive for the sawmill - [1]
 Sure, but use a more dedicated GRBL/RAMPS with touchscreen. [2]. Can be productized.
Sure, but use a more dedicated GRBL/RAMPS with touchscreen. [2]. Can be productized.- But - second route still requires a custom touchscreen with its own MCU, not the standard screens from Marlin - so the Degeneracy criterion fails.
- thus, just modify Marlin, and while not designed for industrial cnc, if we reprogram Marlin, we make it as effective as GRBL/LinuxCNC if we pay attention to programming in added functionality. [3]. The open source revolution is nigh.
Working Doc
Part Library
Part Library
Visual History:












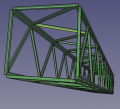
12 foot truss, 4-sided. - FreeCAD -File:12footrebaruss.fcstd
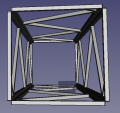
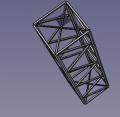
3 foot truss. - FreeCAD -File:3foottruss.FCStd
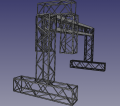
CNC Saw Assembly. - FreeCAD -File:Cncsawassy.FCStd
Small truss. - FreeCAD -File:Smalltruss.FCStd

This has the underlying truss sketch. - FreeCAD -File:Cncsaw.FCStd
Sawmill truss. - FreeCAD -File:Cncsawtruss.FCStd
Options
- Use a 16" circular saw with 2" universal axis. Advantage: turnkey saw. Dis: small cuts only up to 4 or 6", slow (power only 3 hp)
- Use long space frame axis for stability, mount on trailer or SMV
- Use mobile stiff frame on wheels
Industry Standards
- China wares - [6]
- Lucas Sawmill - [7] - setup time with wires for stability is a disadvantage. Solid space frame for moving the OSE mill into the field would help. Peterson [8] setup time is no better. But, it can be set up in the field on rough terrain.
Decisions
- Portable or stationary
- Rough terrain or not
- CNC or manual
- Easy to set up (solid frames) vs not (multi-piece frames with need to align)
- Hand portable vs heavy, requiring other machines to move it
- Production (32 hp - 100 hp) vs hobby (7 hp - 27 hp)