Talk:Oliver Log
Tue, May,23,2017
Some links related to the torchtable height controler:
Working document [1] AD7747 [2] Dummy page (?) [3] Pauls log [4]
---
Trying to re-use Pauls KiCad-Files run into the problem of beeing an older Version, what means all links are broken, see all the question marks in
- Reimport-problem on older Kicad files
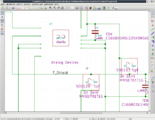
All default parts are in the newer Kicad version replaced by smaller ones, so the links are broken

This is a known problem and theoretically there exists a way to fix it, see https://rheingoldheavy.com/new-stable-kicad-10-steps-to-import-an-old-kicad-project/, but its way to complicated to go through this procedure. Meaning, since Pauls circuit is not too complicated its probably far less work to simply rebuild it from scratch.
---
what about mechanical probing ? https://www.indiegogo.com/projects/bltouch-auto-bed-leveling-sensor-for-3d-printers#/
Mon, May,22,2017
Preparation for torchtable-workgroup meeting on 23.05.:
Suggestions for the long axis:
- supportet Rails [5] would be nice for better stiffness and rigidity, . Makes a price difference of about 20,- EUR or less per m .
* Instead of one 1"-shaft we could use two 1/2"-shafts to resemble the recent unversal axis design as is.
* Or instead we can use just one 1"-shaft and place the stepper onto the carriage (like shapeoko) ==> simplyfied end-pieces (they are only needed to fix the belt).
- Universal Controler: Powerlolu as stepperdriver for heavier loads ?
* Was already discussed on OSE in 2013, see [6]
* sources are available at GitHub [7] and Upverter [8] and Allegro [9] and Cuteminds [10] and Balestrino [11].
* new breakout board from OSH park at [12]
* I tested them already [13] [14] in combination with RAMPS and so far they seemed to work well.
![[13]](https://wiki.opensourceecology.de/images/f/f5/Ba_ra_pol_pow.jpg){kind=link}
![[14]](https://wiki.opensourceecology.de/images/b/b6/MF14_stand_BA_vonvorn.jpg){kind=link}