Industrial Robot/Manufacturing Instructions: Difference between revisions
Jump to navigation
Jump to search
| Line 32: | Line 32: | ||
*[1] Bar | *[1] Bar | ||
**Drill 18 holes | **Drill 18 holes | ||
[[ | [[Media:MainArm.jpg]] | ||
*[8] Bolts | *[8] Bolts | ||
| Line 44: | Line 44: | ||
**Drill 9 holes | **Drill 9 holes | ||
**Weld to tube | **Weld to tube | ||
[[ | [[Media:ForearmPlate.jpg]] | ||
*Tube | *Tube | ||
| Line 51: | Line 51: | ||
**Drill 9 holes | **Drill 9 holes | ||
**Weld to tube | **Weld to tube | ||
[[ | [[Media:ForearmBar.jpg]] | ||
*[8] Bolts | *[8] Bolts | ||
| Line 64: | Line 64: | ||
*[1] Angle | *[1] Angle | ||
**Drill | **Drill | ||
[[ | [[Media:BaseAngle.jpg]] | ||
*[2] Input Plate | *[2] Input Plate | ||
**Drill | **Drill | ||
**Note: Location of mounting holes for hydraulic motor unknown | **Note: Location of mounting holes for hydraulic motor unknown | ||
[[ | [[Media:IRGearbox12InputPlate.jpg]] | ||
*[4] Side Plate | *[4] Side Plate | ||
**Drill | **Drill | ||
[[ | [[Media:IRGearbox12SidePlate.jpg]] | ||
*[2] Cover Plates | *[2] Cover Plates | ||
**Drill | **Drill | ||
[[ | [[Media:IRGearbox12CoverPlate.jpg]] | ||
*[4] Outer Race Plate | *[4] Outer Race Plate | ||
**Torch | **Torch | ||
**Drill | **Drill | ||
[[ | [[Media:IRGearbox12OuterRacePlate.jpg]] | ||
*[2] Round Bar | *[2] Round Bar | ||
| Line 88: | Line 88: | ||
**Drill | **Drill | ||
**Tap | **Tap | ||
[[ | [[Media:IRGearbox12OutputShaft.jpg]] | ||
*[4] Inner Race | *[4] Inner Race | ||
**Turn | **Turn | ||
**Drill | **Drill | ||
[[ | [[Media:IRGearbox12InnerRace.jpg]] | ||
*[2] Output Hub | *[2] Output Hub | ||
| Line 99: | Line 99: | ||
**Drill | **Drill | ||
**Broach | **Broach | ||
[[ | [[Media:IRGearbox12OutputHub.jpg]] | ||
*[2] Support Hub | *[2] Support Hub | ||
| Line 105: | Line 105: | ||
**Drill | **Drill | ||
**Broach | **Broach | ||
[[ | [[Media:IRGearbox12SupportHub.jpg]] | ||
*[1] Loose Ball Bearings | *[1] Loose Ball Bearings | ||
Revision as of 09:39, 12 August 2011
| Industrial Robot | ||
|---|---|---|
| Home | Research & Development | Bill of Materials | Manufacturing Instructions | User's Manual | User Reviews | 
| |
Open Section Fabrication and Assembly
Structure
Foundation
- [2] Main tubes
- [2] Support tubes
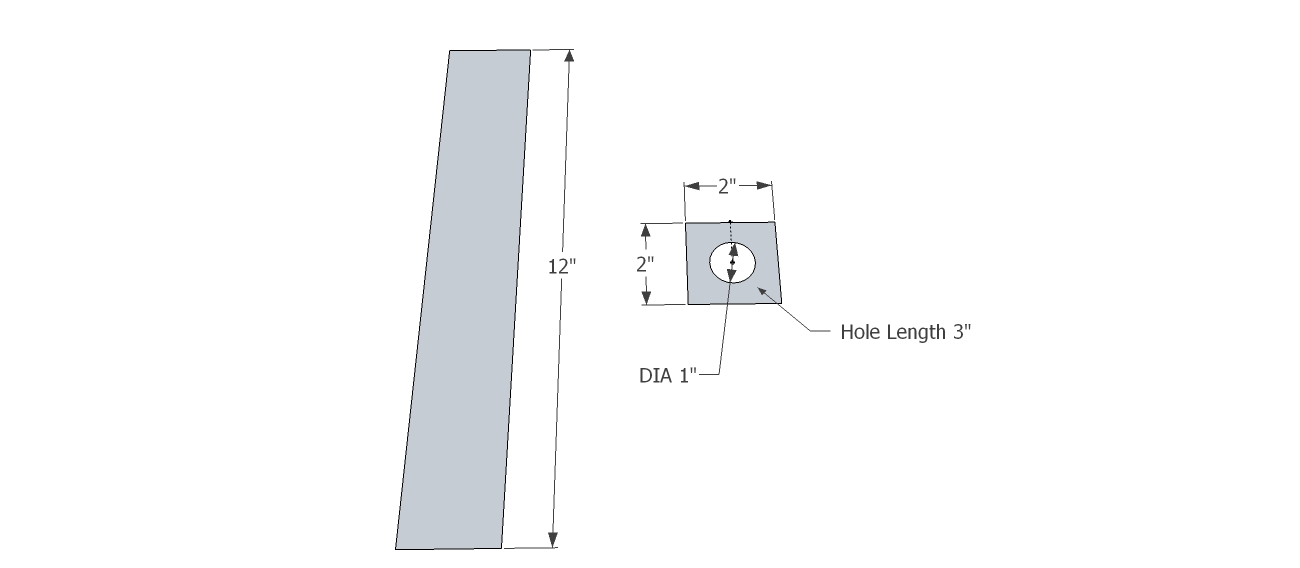
- [4] Raising Bars
- Drill 3 holes in each bar (redone image TBD)
{kind=link}
- [1] Plate
- Drill 13 holes (redone image)
{kind=link}
- [12] Bolts
- [4] Bolts
- [4] Bolts
Main Arm
- [1] Bar
- Drill 18 holes
{kind=link}
- [8] Bolts
- [8] Bolts
Forearm
- Perpendicular Plate
- Drill 9 holes
- Weld to tube
{kind=link}
- Tube
- Parallel Plate
- Drill 9 holes
- Weld to tube
{kind=link}
- [8] Bolts
- [8] Bolts
Gearbox 1,2
- [2] Hydraulic Motor
- [1] Angle
- Drill
{kind=link}
- [2] Input Plate
- Drill
- Note: Location of mounting holes for hydraulic motor unknown
Media:IRGearbox12InputPlate.jpg
{kind=link}
- [4] Side Plate
- Drill
Media:IRGearbox12SidePlate.jpg
{kind=link}
- [2] Cover Plates
- Drill
Media:IRGearbox12CoverPlate.jpg
{kind=link}
- [4] Outer Race Plate
- Torch
- Drill
Media:IRGearbox12OuterRacePlate.jpg
{kind=link}
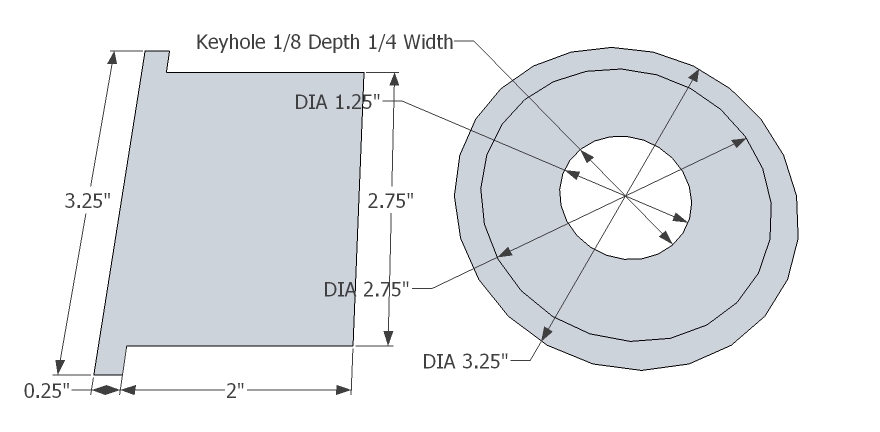
- [2] Round Bar
- Grind
- Drill
- Tap
Media:IRGearbox12OutputShaft.jpg
{kind=link}
- [4] Inner Race
- Turn
- Drill
Media:IRGearbox12InnerRace.jpg
{kind=link}
- [2] Output Hub
- Turn
- Drill
- Broach
Media:IRGearbox12OutputHub.jpg
{kind=link}
- [2] Support Hub
- Turn
- Drill
- Broach
Media:IRGearbox12SupportHub.jpg
{kind=link}
- [1] Loose Ball Bearings
- [12] Side Plate Bolts
- [12] Side Plate Nuts
- [4] Cover Plate Bolts
- [4] Cover Plate Nuts
- [4] O-ring Seal
- [4] Output Shaft Bolts
- [4] Lube Bolts
- [2] Input Gear
- [2] Output Gear
- [2] Key
Gearbox 3,4
Forearm Angle
- As shown below

Wrist Angle
- As shown below

Gearbox 3,4,5,6 Input Plate

- Note: Location of mounting holes for hydraulic motor unknown
Gearbox 3,4,5,6 Side Plates

Gearbox 3,4,5,6 Cover Plates

Gearbox 3,4,5,6 Outer Race Plate

Gearbox 3,4,5,6 Output Hub
 *incorrect picture
*incorrect picture
Gearbox 3,4,5,6 Output Shaft

- Keyed
Gearbox 3,4,5,6 Inner Race

Encoder Mount
Encoder Mount Support Angle

Encoder Mount Main Angle

Encoder Mount Coupling

Stepper Mount
Stepper Motor Mount Angle

Stepper Motor Mount Plate

Shaft Bar
- As shown below, repeat for a total of 6 bars

Assemble Components
Assemble Gearboxes

Assemble Industrial Robot
- As shown below

Assemble Stepper Motor Mount
- As shown below, repeat for a total of 6 mounts

Connect Components
Hydraulic Connections
- 2 Axes Hydraulic Circuit

- Hydraulic Circuit

Electronic Connections
- As shown below
