Industrial Robot/Manufacturing Instructions: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
No edit summary |
||
| Line 70: | Line 70: | ||
=Fabrication= | =Fabrication= | ||
==Stepper Mount== | ==Stepper Mount== | ||
| Line 166: | Line 97: | ||
[[Media:ShaftBar.jpg]] | [[Media:ShaftBar.jpg]] | ||
=Assembly= | |||
==Assemble Stepper Motor Mount== | ==Assemble Stepper Motor Mount== | ||
| Line 172: | Line 105: | ||
[[Media:Stepneedlemount.jpg]] | [[Media:Stepneedlemount.jpg]] | ||
*Solder PWM driver [http://reprap.org/wiki/PWM_Driver_1_1 Instructions] | |||
*Solder | |||
[[Category:Industrial Robot]] | [[Category:Industrial Robot]] | ||
Revision as of 19:58, 3 September 2011
| Industrial Robot | ||
|---|---|---|
| Home | Research & Development | Bill of Materials | Manufacturing Instructions | User's Manual | User Reviews | 
| |
Tooling and Infrastructure
Measuring and Marking
- Scriber
- Try-square
- Box-square
- Metal Rule
- Combination Set
- Center Punch
- Nipple Punch
Taps and Dies
- 1/2" - 13 Taps
- 9/16" - 18 Taps
- Tap Wrench
Port Cutting
- SAE6 Port Contour Cutter
Drilling
- Cordless Drill
- 1/2" drill bit
- 3/8" drill bit
- 1/4" drill bit
- 5/32" drill bit
- 1/8" drill bit
Soldering
- Soldering Iron and Stand
- Solder
Torching
- Oxy-acetylene Torch
Turning
- Lathe
- Cutting tools - turning, grooving
Hand Tools
- Adjustable pliers
- File
Fabrication
Stepper Mount
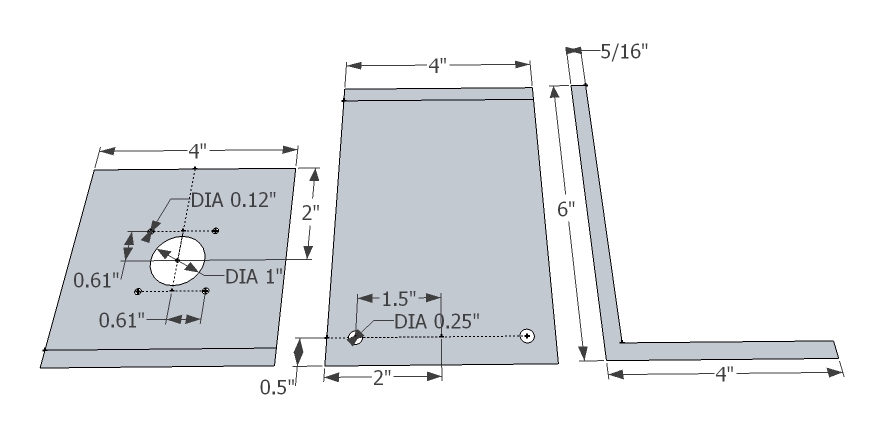
[6] Stepper Motor Mount Angle
- Mark cuts with scriber and try-square
- Cut with torch cutter
- Mark holes with scriber, rule, try-square, and center punch
- Drill holes with 1" bit, 1/4" bit, 1/8" bit, and cordless drill
Media:StepperMotorMountAngle.jpg
{kind=link}
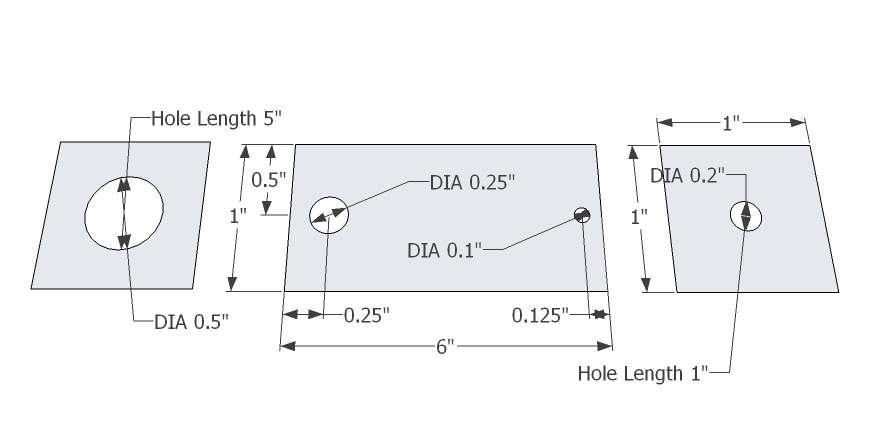
[6] Stepper Motor Mount Plate
- Mark cuts with scriber and try-square
- Cut with torch cutter
- Mark holes with scriber, rule, try-square, and center punch
- Drill holes with 1/4" bit and cordless drill
Media:StepperMotorMountPlate.jpg
{kind=link}
[6] Shaft Coupling
- Mark cuts with scriber and box-square
- Cut with torch cutter
- Mark thru hole with scriber, combination set, and center punch
- Drill holes with 1/2" bit, 1/4" bit, 5/32" bit, and cordless drill
- Tap holes with 10-24 taper/intermediate/plug taps and tap wrench
{kind=link}
Assembly
Assemble Stepper Motor Mount
- As shown below, repeat for a total of 6 mounts
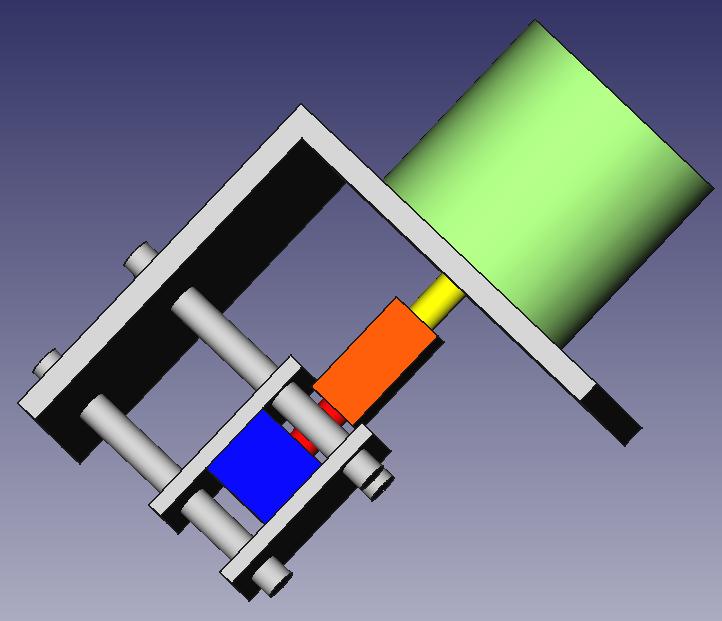{kind=link}
- Solder PWM driver Instructions