Industrial Robot/Manufacturing Instructions
Jump to navigation
Jump to search
| Industrial Robot | ||
|---|---|---|
| Home | Research & Development | Bill of Materials | Manufacturing Instructions | User's Manual | User Reviews | 
| |
Tooling and Infrastructure
Measuring and Marking
- Scriber
- Try-square
- Box-square
- Metal Rule
- Combination Set
- Center Punch
- Nipple Punch
Taps and Dies
- 1/2" - 13 Taps
- 9/16" - 18 Taps
- Tap Wrench
Port Cutting
- SAE6 Port Contour Cutter
Drilling
- Cordless Drill
- 1/2" drill bit
- 3/8" drill bit
- 1/4" drill bit
- 5/32" drill bit
- 1/8" drill bit
Soldering
- Soldering Iron and Stand
- Solder
Torching
- Oxy-acetylene Torch
Turning
- Lathe
- Cutting tools - turning, grooving
Hand Tools
- Adjustable pliers
- File
Open Section Fabrication and Assembly

Structure
Foundation
[2] Main tubes
- Mark cut lines with scriber, tape measure, and try-square
- Cut to dimensions with a torch cutter
- Mark 1/2" dia. hole centers with scriber, tape measure, try-square, and center punch
- Drill 1/2" dia. holes with 1/2" bit and cordless drill
- Remove burrs around the holes with a file
[2] Support tubes
- Mark cut lines with scriber and try-square
- Cut with torch cutter
- Mark drill points with scriber, try-square, and center punch
- Drill with cordless drill or drill press
- Smooth with file
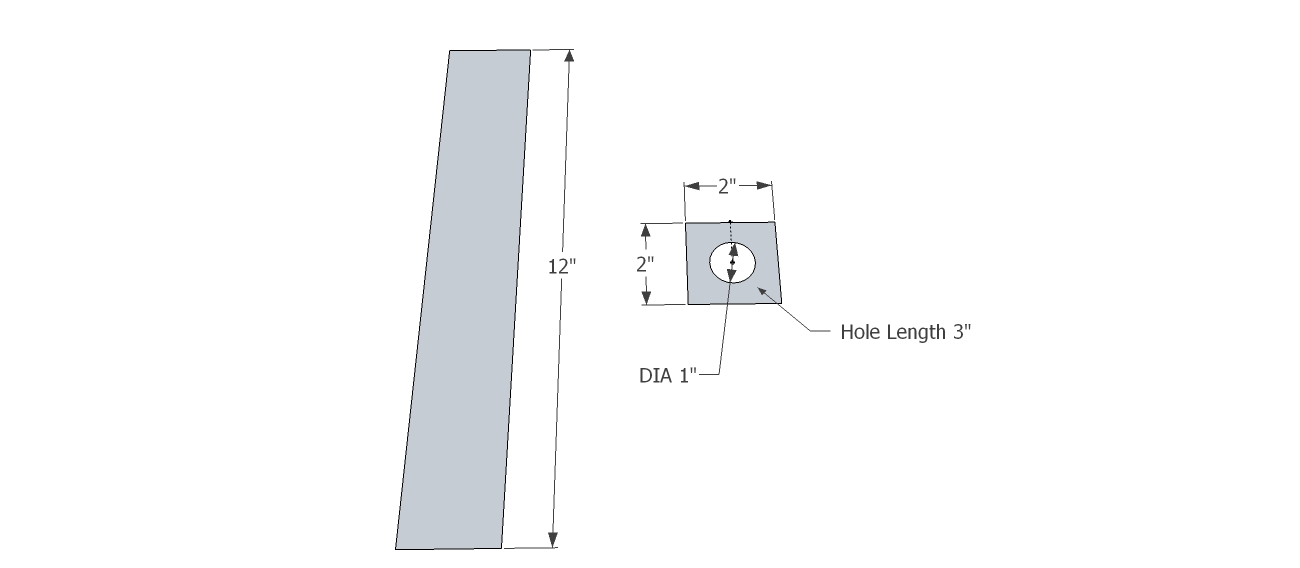
[4] Raising Bars
- Mark cut lines with scriber and try-square
- Cut with torch cutter
- Mark drill points with scriber, try-square, and center punch
- Drill with cordless drill or drill press
- Smooth with file
- (new image TBD)
- Media:Pillar.jpg
{kind=link}
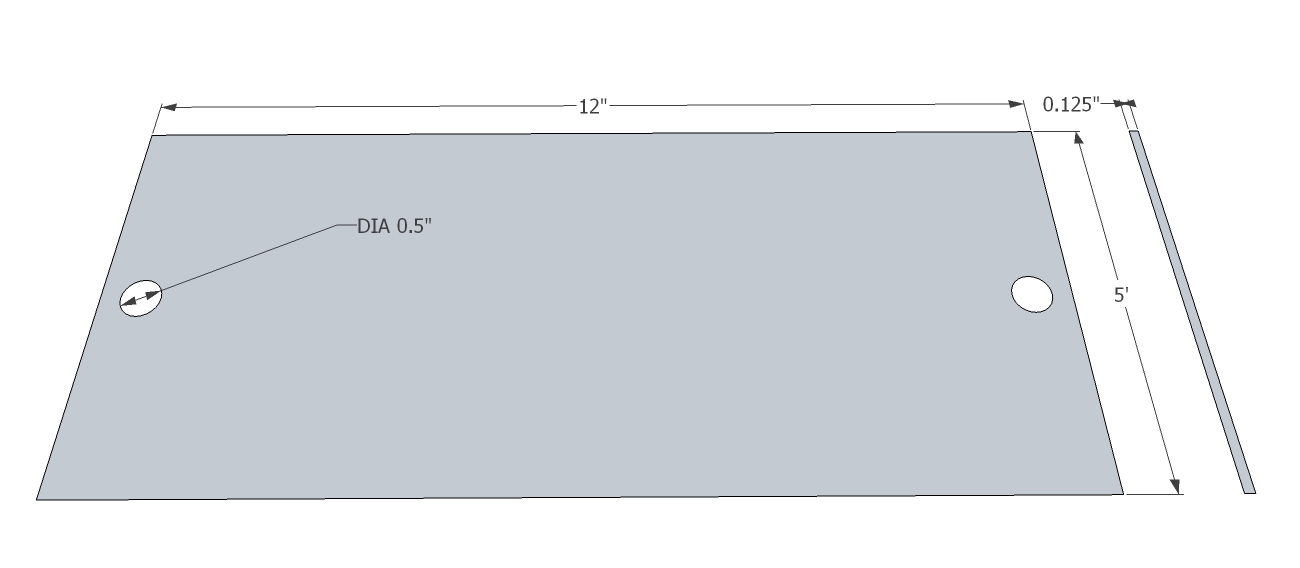
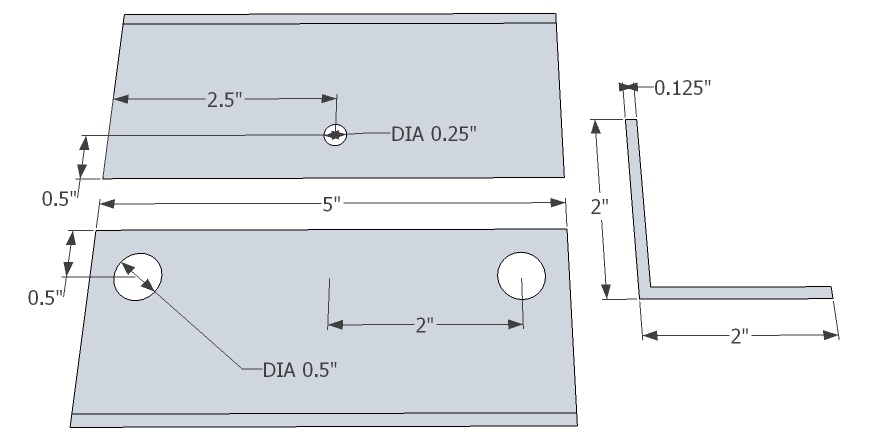
[1] Base Plate
- Mark drill points with scriber, try-square, and center punch
- Drill with cordless drill or drill press
- Smooth with file
- (new image TBD)
- Media:IROverplate.jpg
{kind=link}
Main Arm
- [1] Bar
- Mark with scriber, try-square, divider, center punch
- Drill with drill press or cordless drill
- Media:MainArm.jpg
{kind=link}
- [8] Bolts
- [8] Bolts
Forearm
- Perpendicular Plate
- Drill 9 holes
- Weld to tube
- Media:ForearmPlate.jpg
{kind=link}
- Tube
- Parallel Plate
- Drill 9 holes
- Weld to tube
- Media:ForearmBar.jpg
{kind=link}
- [8] Bolts
- [8] Bolts
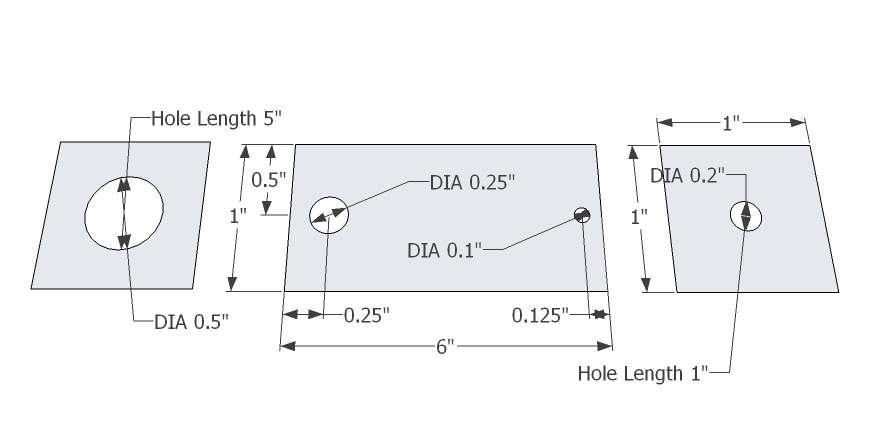
Gearbox 1,2
[1] Angle
- Mark the 1/2" dia. hole centers with a scriber, rule, try-square, and center punch
- Mark the larger dia. hole centers with a scriber, try-square, and nipple punch; then their circumferences with a divider
- Cut the larger dia. holes with a torch cutter
- Drill the 1/2" dia. holes with a 1/2" bit and cordless drill
- Remove burrs around the holes with a file
{kind=link}
[2] Input Plate
- Mark cut lines with scriber, rule, and try-square
- Cut plates with appropriate dimensions with torch cutter
- Mark the 1/2" dia. holes with a scriber, rule, try-square, and center punch
- Mark the 2" and 3.5" dia. hole centers with a scriber, rule, try-square, and nipple punch
- Mark the 2" and 3.5" dia. hole circumferences with a divider
- Cut the 2" and 3.5" dia. holes with a torch cutter
- Drill the 1/2" dia. holes with a 1/2" bit and cordless drill
- Remove burrs around the holes with a file
{kind=link}
- Note: Location of motor mounting holes TBD
[4] Side Plate
- Mark cut lines with a scriber, rule, and try-square
- Cut to appropriate dimensions with torch cutter
- Mark 1/2" dia. hole centers with a scriber, try-square, and center punch
- Drill the 1/2" dia. holes with a 1/2" bit and cordless drill
- Remove burrs with a file
{kind=link}
[2] Cover Plates
- Mark cuts with scriber and try-square
- Cut with torch cutter
- Mark holes with scriber, try-square, rule, and center punch
- Drill holes with 1/2" bit and cordless drill
- Smooth with a file
- Media:IRGearbox12CoverPlate.jpg
{kind=link}
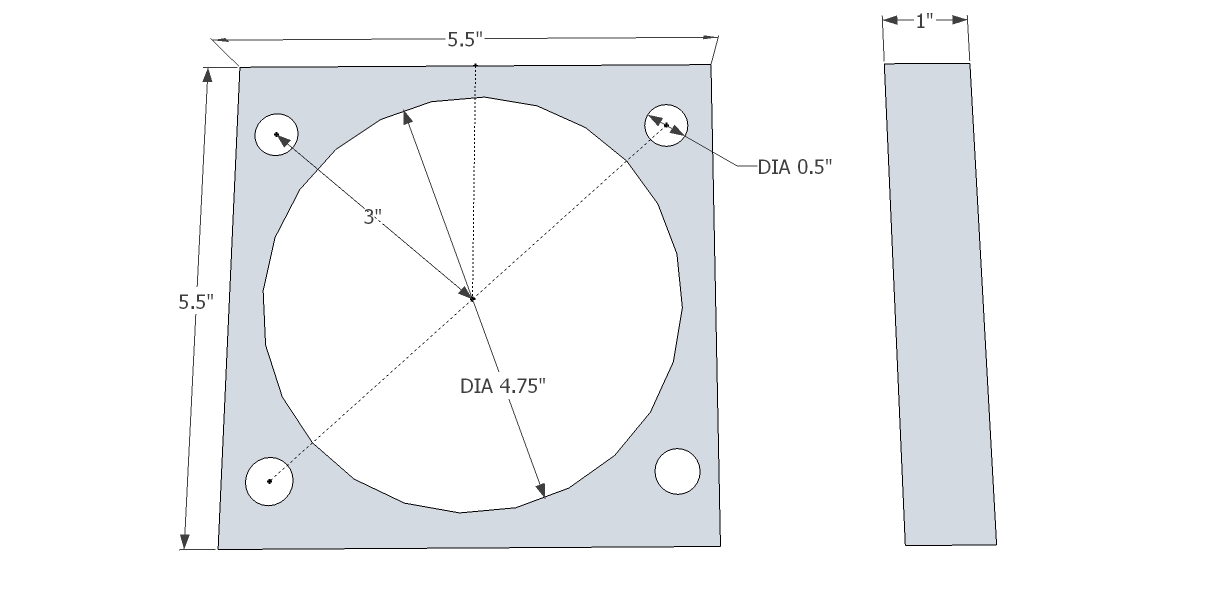
[4] Outer Race Plate
- Mark cuts with scriber and try-square
- Cut with torch cutter
- Mark drill holes with scriber, try-square, rule, and center punch
- Mark torch hole with scriber, rule, nipple punch, and divider
- Drill with 1/2" bit and cordless drill
- Torch with torch cutter
- Smooth with a file
- Media:IRGearbox12OuterRacePlate.jpg
{kind=link}
[2] Round Bar
- Mark cuts with scriber and box-square
- Cut with torch cutter
- Mark drill holes with scriber, combination set, and center punch
- Drill with 1/2" bit and cordless drill
- Tap with 1/2" - 13 taper/intermediate/plug taps and tap wrench
- Media:IRGearbox12OutputShaft.jpg
{kind=link}
[4] Inner Race
- Mark cuts with scriber and box-square
- Cut with torch cutter
- Mark with scriber and divider
- Turn with lathe
- Groove with lathe
- Mark hole with scriber, combination set, nipple punch, and divider
- Torch with torch cutter
- Smooth with file
- Media:IRGearbox12InnerRace.jpg
{kind=link}
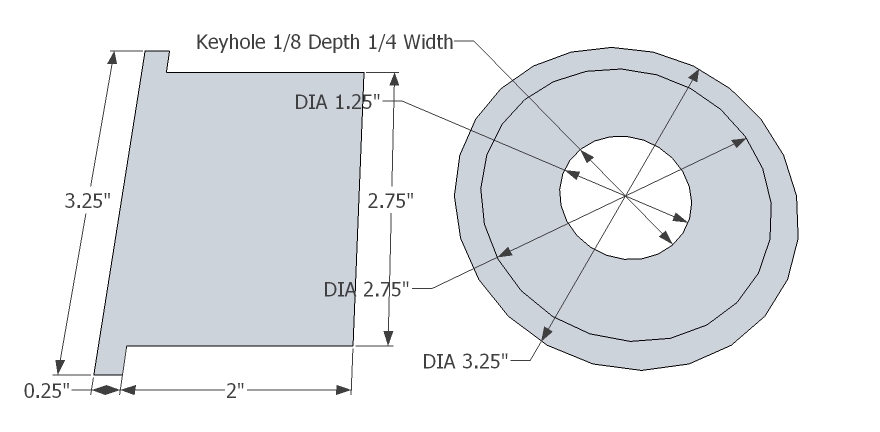
[2] Output Hub
- Mark cuts with scriber and box-square
- Cut with torch cutter
- Mark with scriber and divider
- Turn with lathe
- Groove with lathe
- Mark hole with scriber, combination set, nipple punch, and divider
- Torch with torch cutter
- Smooth with file
- Media:IRGearbox12OutputHub.jpg
{kind=link}
[2] Support Hub
- Mark cuts with scriber and box-square
- Cut with torch cutter
- Mark with scriber and divider
- Turn with lathe
- Groove with lathe
- Mark hole with scriber, combination set, nipple punch, and divider
- Torch with torch cutter
- Smooth with file
- Media:IRGearbox12SupportHub.jpg
{kind=link}
- [2] Input Gear
- [2] Output Gear
- [2] Key
Gearbox 3,4
Forearm Angle
- As shown below
{kind=link}
- As shown below
{kind=link}
- Input Plate
- Media:IRGearbox3456InputPlate.jpg
- Note: Location of mounting holes for hydraulic motor unknown
{kind=link}
- Side Plate
{kind=link}
- Cover Plates
{kind=link}
- Outer Race Plate
{kind=link}
- Output Hub
{kind=link}
- Output Shaft
{kind=link}
- Inner Race
{kind=link}
Gearbox 5,6
- Wrist Angle
- As shown below
- Input Plate
- Media:IRGearbox3456InputPlate.jpg
- Note: Location of mounting holes for hydraulic motor unknown
- Side Plate
- Cover Plates
- Outer Race Plate
- Output Hub
- Output Shaft
- Inner Race
Encoder Mount
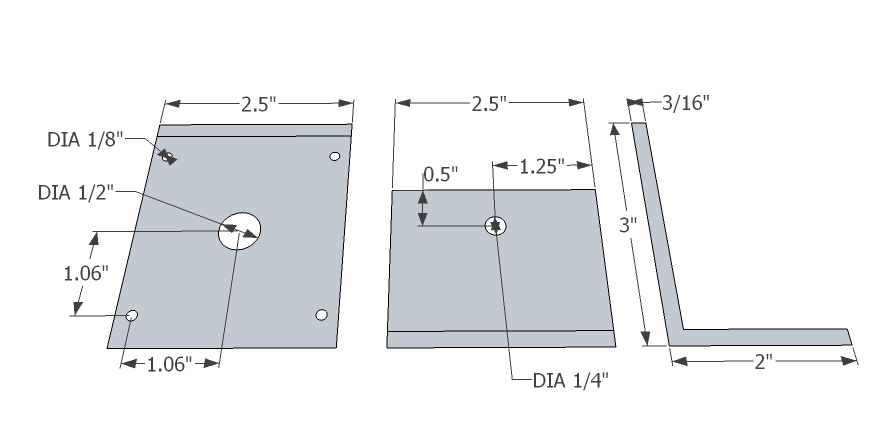
Encoder Mount Support Angle
- Mark cut lines with scriber and combination square
- Cut to appropriate dimensions with torch cutter
- Mark 1/2" and 1/4" hole centers with scriber, combination square, and center punch
- Drill 1/2" and 1/4" holes with 1/2" bit, 1/4" bit, and cordless drill
- Remove burrs with file
{kind=link}
Encoder Mount Main Angle
- Mark cuts with scriber and try-square
- Cut with torch cutter
- Mark drill holes with scriber, try-square, and rule
- Drill holes with 1/4" bit, 0.15" bit, and cordless drill
- Media:IREncoderMountAngleB.jpg
{kind=link}
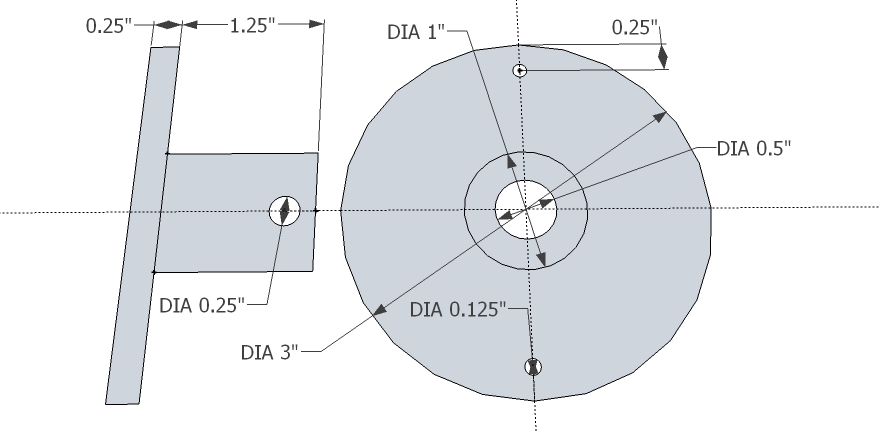
Encoder Mount Coupling
- Mark cuts with scriber and box-square
- Cut with torch cutter
- Turn with lathe and cutting tool
- Mark thru- and mount holes with scriber, try-square, combination set, and center punch
- Mark set hole with box square
- Drill holes with 1/2" bit, 1/4" bit, and cordless drill
- Media:IREncoderMountCoupling.jpg
{kind=link}
Stepper Mount
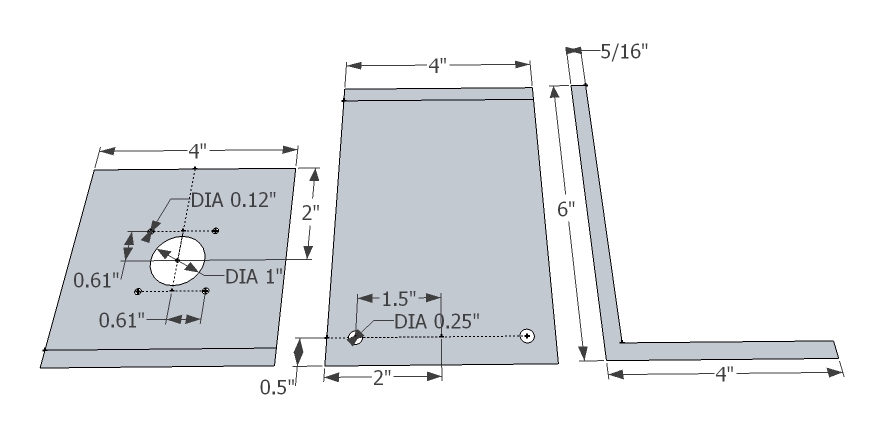
- Stepper Motor Mount Angle
- Mark cuts with scriber and try-square
- Cut with torch cutter
- Mark holes with scriber, rule, try-square, and center punch
- Drill holes with 1" bit, 1/4" bit, 1/8" bit, and cordless drill
Media:StepperMotorMountAngle.jpg
{kind=link}
- Stepper Motor Mount Plate
- Mark cuts with scriber and try-square
- Cut with torch cutter
- Mark holes with scriber, rule, try-square, and center punch
- Drill holes with 1/4" bit and cordless drill
Media:StepperMotorMountPlate.jpg
{kind=link}
- Shaft Bar
- Mark cuts with scriber and box-square
- Cut with torch cutter
- Mark thru hole with scriber, combination set, and center punch
- Drill holes with 1/2" bit, 1/4" bit, 5/32" bit, and cordless drill
- Tap holes with 10-24 taper/intermediate/plug taps and tap wrench
{kind=link}
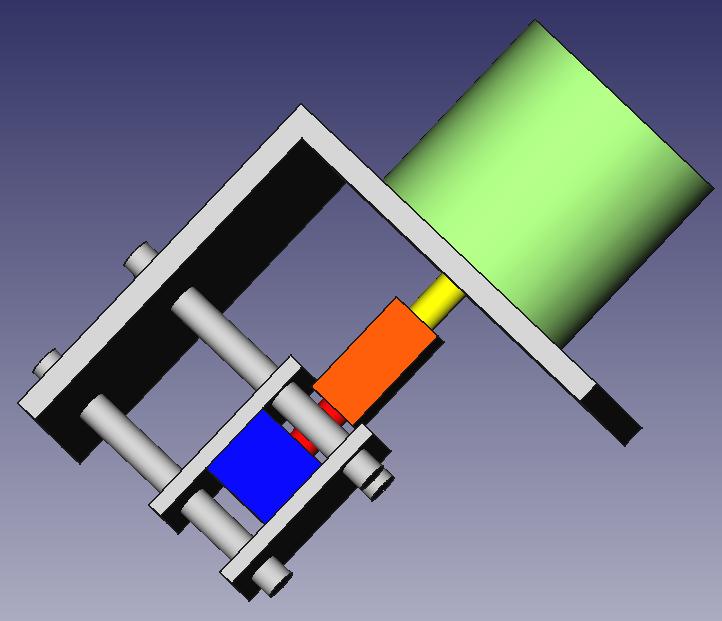
Assemble Components
Assemble Gearboxes
{kind=link}
Assemble Industrial Robot
- As shown below
{kind=link}
Assemble Stepper Motor Mount
- As shown below, repeat for a total of 6 mounts
{kind=link}
Connect Components
Hydraulic Connections
- 2 Axes Hydraulic Circuit
- Correction: Relief valve inline between pump and input tee set
{kind=link}
- Hydraulic Circuit
{kind=link}
Electronic Connections
- Solder solenoid driver Instructions
- As shown below
Media:ElectronicConnections.jpg
{kind=link}
Programming
- Programming the Microcontroller
- Download Arduino IDE Arduino IDE Download
- Connect Arduino microcontroller to computer through USB port
- Execute Arduino IDE
- Copy and paste microcontroller code from the source file [here]
- Sketch > Verify/Compile
- Upload
- Python Jogger
- Get python code [here]
- Execute python jogger program
- Get instructions [here]
Testing
Homing
- Connect the microcontroller to the computer via USB
- Execute python jogger program
- Turn on the pump
- Press H on the keyboard
- If the python jogger prints failure text, turn off the pump and troubleshoot
Record Sequence Test
- Connect the microcontroller to the computer via USB
- Execute python jogger program
- Turn on the pump
- Home all axes
- Follow python jogger instructions [here] to record a waypoint and save the .ini file
Perform Sequence Test
- Connect the microcontroller to the computer via USB
- Execute python jogger program